Robotic Personalization
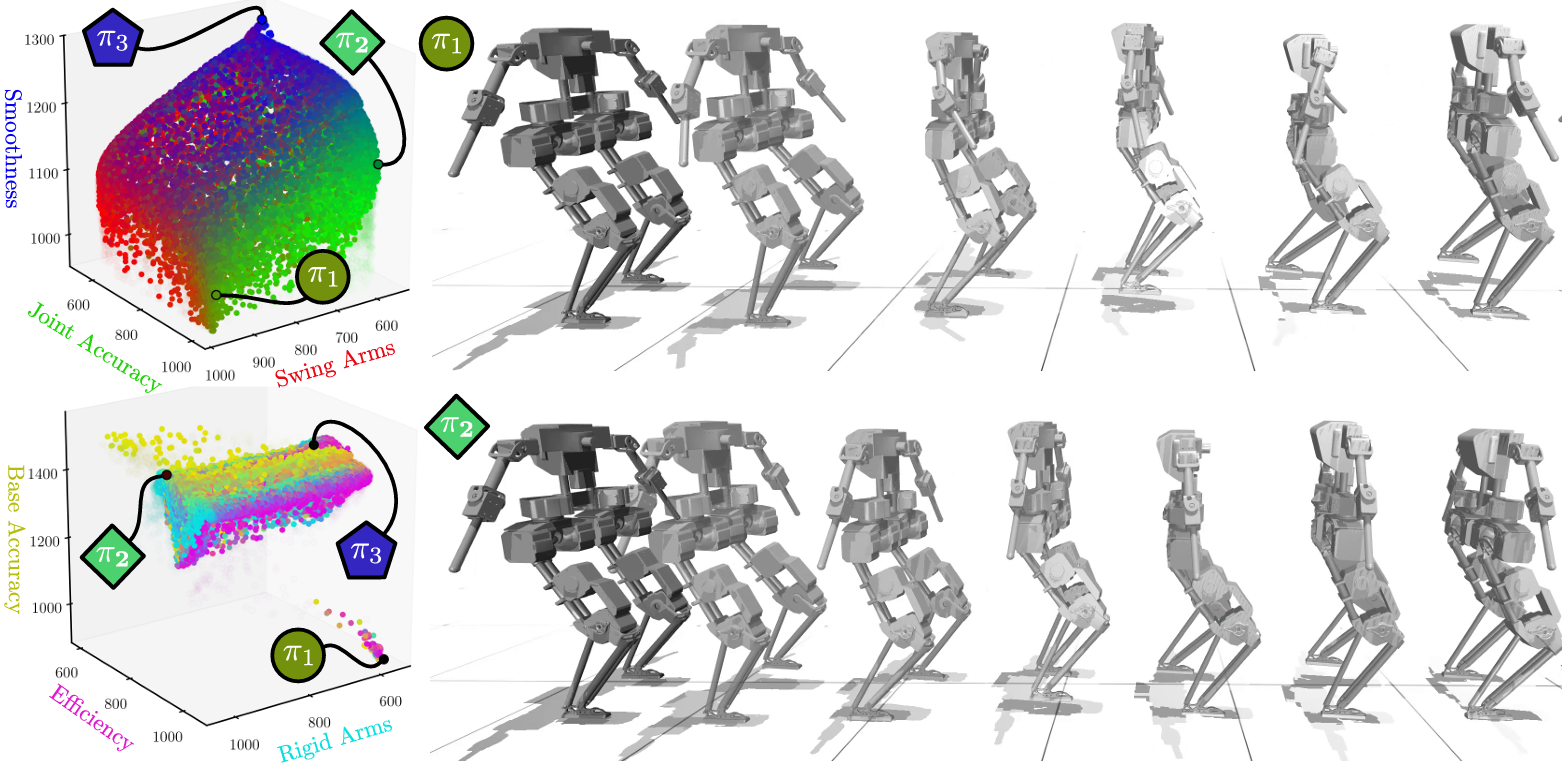
User-centric robots, like exoskeletons, can benefit from the ability to be tuned from human feedback and become more aligned with their operators. Thus, this project is focused on designing personalizable control architecture that retains robustness and performance while also adjusting to user preferences. By learning from subjective human feedback, we can take advantage of a human’s natural ability to judge good behavior in ways that are not able to be captured numerically.
There are no open positions on this project currently. However, if you’re interested, send Neil a short email according to the guidlines found on the join page.
PhD Students
- Neil Janwani (njanwani at gatech dot edu)
Tools & Technologies
JaX, Multi-Objective RL, MuJoCo, Human Study Design