Robust Bipedal Locomotion via Reachability Analysis
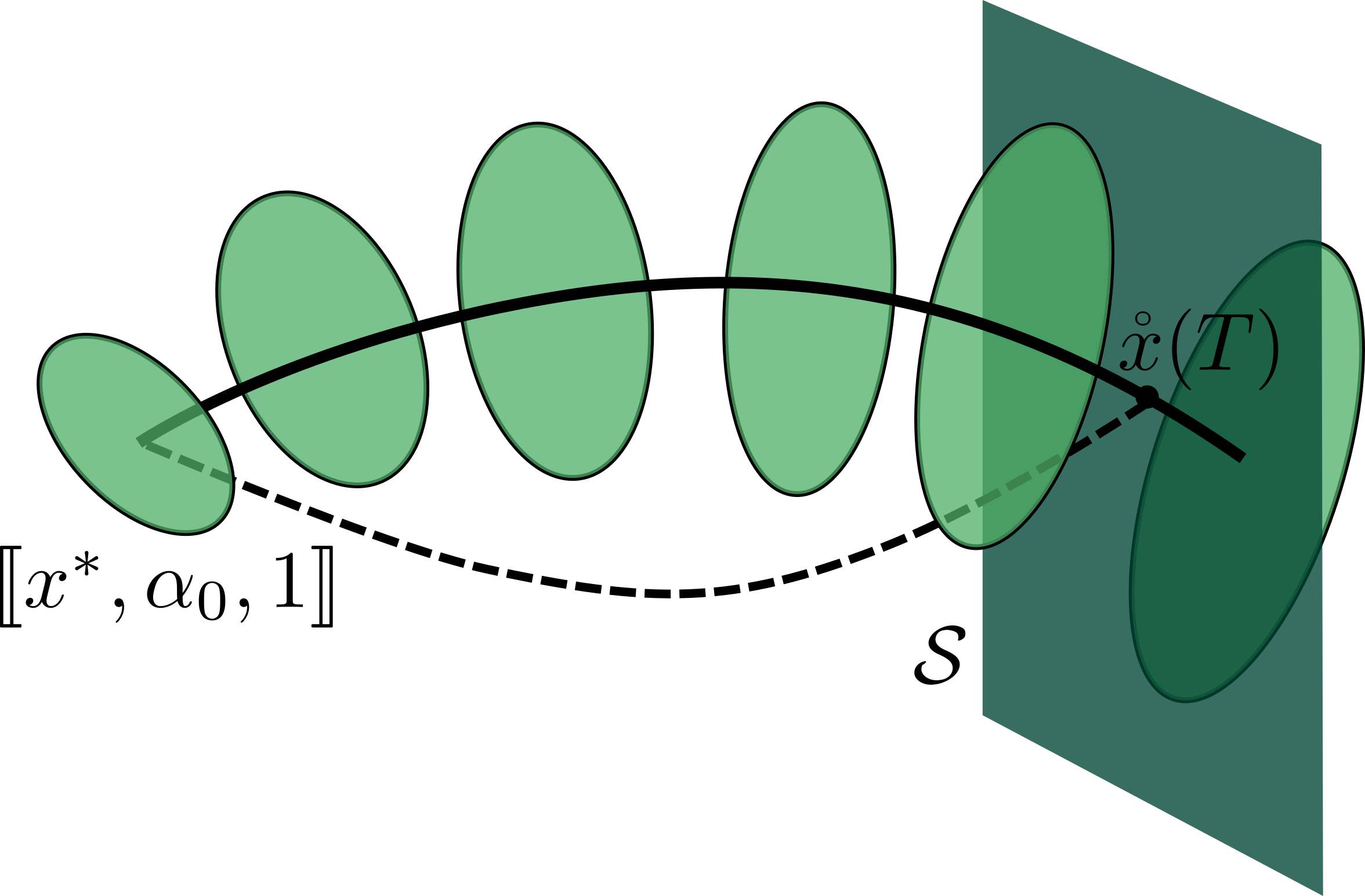
Reachability analysis provides a powerful framework for understanding and guaranteeing robustness in bipedal systems. By computing the set of states that a system can reach under various conditions, we can identify safe operating regions, quantify robustness margins, and design controllers that maintain stability despite model uncertainties and disturbances. This is especially relevant to wearables and exoskeletons, where failure poses a great risk to the patient’s safety.
In this project, we develop algorithms based on reachability analysis for verification and design of bipedal robot controllers with safety and reliability guarantees. Ultimately, this work will bridge the gap between theoretical guarantees and practical implementation on bipedal robots and wearable devices.
PhD Students
- Varun Madabushi (vmadabushi3 at gatech dot edu)
Collaborators
- Akash Harapanahalli
- Sam Coogan
Tools & Technologies
Hybrid Systems Theory, Reachability Analysis, Robust Control, Contraction Theory